


- 液位儀表系列
- 流量?jī)x表系列
- 物位儀表系列
- 壓力/液位/差壓/密度變送器
- 液位/溫度/壓力/流量-報(bào)警儀
- PLC/DCS自動(dòng)化控制監(jiān)控系統(tǒng)
- GPRS無(wú)線(xiàn)遠(yuǎn)傳裝置
- 物位儀表系列
- 有紙/無(wú)紙記錄儀系列
- 溫度儀表系列
- 分析儀|檢測(cè)儀|校驗(yàn)儀系列

全國(guó)銷(xiāo)售熱線(xiàn):400-9280-163
電話(huà):86 0517-86917118
傳真:86 0517-86899586
銷(xiāo)售經(jīng)理:1560-1403-222 (丁經(jīng)理)
??? ? ? ? 139-1518-1149 (袁經(jīng)理)
業(yè)務(wù)QQ:2942808253 / 762657048
網(wǎng)址:http://www.kkkgq.cn
電話(huà):86 0517-86917118
傳真:86 0517-86899586
銷(xiāo)售經(jīng)理:1560-1403-222 (丁經(jīng)理)
??? ? ? ? 139-1518-1149 (袁經(jīng)理)
業(yè)務(wù)QQ:2942808253 / 762657048
網(wǎng)址:http://www.kkkgq.cn
?? ??
??
??
?

投入式液位計(jì)在大壩形變監(jiān)測(cè)系統(tǒng)中的應(yīng)用
發(fā)表時(shí)間:2018-07-12 ??點(diǎn)擊次數(shù):1043? 技術(shù)支持:1560-1403-222
北斗大壩形變監(jiān)沒(méi)是北斗衛(wèi)星高精度定位的一種具體應(yīng)用,整個(gè)系統(tǒng)要做一**測(cè)量,需要一整套的設(shè)備的協(xié)同才能實(shí)現(xiàn),其中投入式液位計(jì)等用于液位測(cè)量的儀表的作用也不可小覷,主要作用也是通過(guò)水位的變化來(lái)測(cè)量大壩的形變。本文主要介紹北斗大壩形變監(jiān)測(cè)系統(tǒng)的組成結(jié)構(gòu)、數(shù)據(jù)處理流程,以及使用定位數(shù)據(jù)處理誤差改正模式來(lái)提高監(jiān)測(cè)精度的方法。采集的北斗衛(wèi)星數(shù)據(jù)通過(guò)通信網(wǎng)絡(luò)送到數(shù)據(jù)處理中心,解算數(shù)據(jù)得到監(jiān)測(cè)點(diǎn)和基準(zhǔn)站的相對(duì)位移,從而達(dá)到監(jiān)測(cè)大壩形變的目的。
引言
北斗大壩形變監(jiān)測(cè)主要采用北斗差分定位方式,在一個(gè)已知經(jīng)緯度等信息的基準(zhǔn)站設(shè)置高精度北斗接收機(jī),在大壩壩體上設(shè)置的若十高精度北斗接收機(jī)等設(shè)備作為監(jiān)測(cè)點(diǎn),同時(shí)觀(guān)測(cè)相同的北斗衛(wèi)星,獲取相應(yīng)的北斗衛(wèi)星數(shù)據(jù)。采集的北斗衛(wèi)星數(shù)據(jù)通過(guò)通信網(wǎng)絡(luò)送到數(shù)據(jù)處理中心,解算數(shù)據(jù)得到監(jiān)測(cè)點(diǎn)和基準(zhǔn)站的相對(duì)位移,從而達(dá)到監(jiān)測(cè)大壩形變的目的。
1北斗大壩形變監(jiān)測(cè)系統(tǒng)組成
北斗大壩形變監(jiān)測(cè)系統(tǒng)由數(shù)據(jù)采集子系統(tǒng)、通信網(wǎng)絡(luò)、數(shù)據(jù)分析處理中心、遠(yuǎn)程監(jiān)控平臺(tái)等構(gòu)成。
1.1數(shù)據(jù)采集子系統(tǒng)
數(shù)據(jù)采集子系統(tǒng)包括基準(zhǔn)站和監(jiān)測(cè)點(diǎn)兩部分。數(shù)據(jù)采集子系統(tǒng)功能是:采集基準(zhǔn)站及監(jiān)測(cè)站的定位信息,并定時(shí)向數(shù)據(jù)處理中心發(fā)送采集的數(shù)據(jù)。
基準(zhǔn)站是整個(gè)監(jiān)測(cè)系統(tǒng)的基準(zhǔn)參考,需建在穩(wěn)定的基巖上,基準(zhǔn)站安裝高精度北斗接收機(jī)采集衛(wèi)星觀(guān)測(cè)數(shù)據(jù)。監(jiān)測(cè)站分布在整個(gè)形變區(qū)域特征點(diǎn)上,即在壩體預(yù)理多個(gè)高精度北斗接收機(jī)、電子數(shù)據(jù)采集主機(jī)和電子傳感器作為監(jiān)測(cè)站。
1.1.1數(shù)據(jù)采集主機(jī)
數(shù)據(jù)采集主機(jī)特點(diǎn)如下:
①高精度衛(wèi)星接收機(jī)一次輸出的數(shù)據(jù)量較大,要求緩存較大,通信鏈路斷時(shí)需要木地保存大量數(shù)據(jù),要求外接TF存儲(chǔ)器作為北斗數(shù)據(jù)存儲(chǔ)器。MCU選用ST公司的一款(Cortex-M3芯片。
②數(shù)據(jù)采集主機(jī)與高精度北斗衛(wèi)星接收機(jī)同在一個(gè)金屬殼體內(nèi)部,連接高精度北斗接收機(jī)的串口不需防雷處理,采用普通串口即可。RT1 RS232連接北斗接收}JL,采集北斗數(shù)據(jù)。
③隔離485接口主要連接電子式水平傳感器、垂直位移傳感器,485接口水位計(jì)、485接口雨量傳感器、土層濕度傳感器等。
④帶防護(hù)裝置的網(wǎng)口用于連接通信網(wǎng)絡(luò),向數(shù)據(jù)處理中心發(fā)送采集的北斗定位數(shù)據(jù)和外部傳感數(shù)據(jù)。
⑤ 4-20mA模擬信號(hào)輸入口用于連接4-20mA輸出接口的雨量傳感器、水位計(jì)、土層濕度傳感器等。輸入信號(hào)經(jīng)過(guò)電流/電壓變換后送入MCU的A/D轉(zhuǎn)換器進(jìn)行數(shù)字化處理。
⑥許多翻斗式雨量傳感器等輸出的是脈沖信號(hào),可以通過(guò)計(jì)數(shù)脈沖輸入口接入。計(jì)數(shù)脈沖經(jīng)過(guò)普通MCU的I/ O口輸入,結(jié)合內(nèi)部定時(shí)器廣計(jì)數(shù)器統(tǒng)計(jì)雨量。
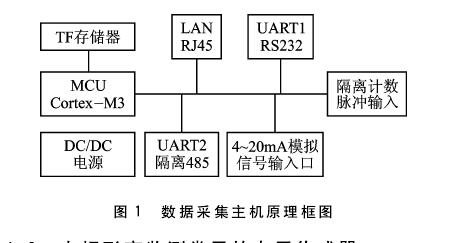
數(shù)據(jù)采集主機(jī)原理框圖如圖1所示。
圖1數(shù)據(jù)采集主機(jī)原理框圖
1.1.2大壩形變監(jiān)測(cè)常用的電子傳感器
(1)水位計(jì)
水位計(jì)種類(lèi)比較多,有投入式液位計(jì)、浮子式水位計(jì)、超聲波水位計(jì)、壓力式水位計(jì)、等,各有特點(diǎn),使用時(shí)要根據(jù)壩體周?chē)木唧w情況選用。
①浮子式水位計(jì)其原理是由浮子感應(yīng)水位的升降。有用機(jī)械方式直接使浮子傳動(dòng)記錄結(jié)構(gòu)的普通水位計(jì),有把浮子提供的轉(zhuǎn)角量轉(zhuǎn)換成增量電脈沖或二進(jìn)制編碼脈沖作遠(yuǎn)距離傳輸?shù)碾妭鳌?shù)傳水位計(jì),還有由微型浮子和許多十簧管組成的數(shù)字傳感水位計(jì)等。應(yīng)用較廣的是機(jī)械式浮子水位計(jì)。應(yīng)用浮子式水位計(jì)需有測(cè)井設(shè)備,只適合于岸坡穩(wěn)定、河床沖淤很小的低含沙量河段使用。
②超聲波水位計(jì)是反射式水位計(jì)的一種,應(yīng)用聲波遇不同介面反射的原理來(lái)測(cè)定水位。分為氣介式和水介式兩類(lèi)。氣介式以空氣為聲波的傳播介質(zhì),換能器置于水面上方,由水面反射聲波,根據(jù)回波時(shí)間可計(jì)算并顯不出水位。儀器不接觸水體,完全擺脫水中泥沙、流速?zèng)_擊和水草等不利因素的影響。水介式是將換能器安裝在河底,向水面發(fā)射聲波,也不需要建測(cè)井。兩種水位計(jì)均可用電纜傳輸至室內(nèi)顯不或存儲(chǔ)記錄。
③壓力式水位計(jì)的工作原理是測(cè)量水壓力,推算水位。其特點(diǎn)是無(wú)需建靜水測(cè)井,可以將傳感器固定在河底,用引壓管消除大氣壓力,從而直接測(cè)得水位。壓力式水位計(jì)有兩類(lèi):一類(lèi)為氣泡型,在引壓管中不斷輸氣,用自動(dòng)調(diào)節(jié)的壓力天平將水壓力轉(zhuǎn)換成機(jī)械轉(zhuǎn)角量,從而帶動(dòng)記錄機(jī)構(gòu);另一類(lèi)為電測(cè)型,它應(yīng)用固態(tài)壓阻器件作傳感器,可直接將水壓力轉(zhuǎn)變成電壓模量或頻率量輸出,然后用導(dǎo)線(xiàn)傳輸至岸上進(jìn)行處理和記錄。
④跟蹤式水位計(jì)又稱(chēng)接觸式水位計(jì),利用重錘上的電測(cè)針接觸水面發(fā)出電信號(hào),使電機(jī)正轉(zhuǎn)或逆轉(zhuǎn),隨時(shí)跟蹤水面點(diǎn)的位置,從而測(cè)定水位。一般在較陡岸坡上架設(shè)鐵管,懸錘和懸索在管道中升降,驅(qū)動(dòng)記錄或信號(hào)裝置。鐵管進(jìn)水口需有沉沙和凈水設(shè)施。
⑤投入式液位計(jì)是基于所測(cè)液體靜壓與該液體高度成正比的原理,采用擴(kuò)散硅或陶瓷敏感元件的壓阻效應(yīng),將靜壓轉(zhuǎn)成電信號(hào)。經(jīng)過(guò)溫度補(bǔ)償和線(xiàn)性校正,轉(zhuǎn)換成4-20 mA標(biāo)準(zhǔn)電流信號(hào)輸出。投入式液位計(jì)的傳感器部分可直接投入到液體中,變送器部分可用法蘭或支架固定,安裝使用較為方便。
考慮數(shù)據(jù)采集主機(jī)用以連接傳感器的接口只有485接口和4-20 mA輸入接口,因此選用水位時(shí)應(yīng)考慮接口匹配。
(2)雨量傳感器
常用的雨量傳感器是翻斗型雨量傳感器,主要工作原理是承水口收集的雨水,經(jīng)過(guò)上筒(漏斗)注入計(jì)量翻斗,翻斗是用工程塑料注射成型的,由中間隔板分成兩個(gè)等容積的三角斗室。它是一個(gè)機(jī)械雙穩(wěn)態(tài)結(jié)構(gòu),當(dāng)一個(gè)斗室接水時(shí),另一個(gè)斗室處于等待狀態(tài)。當(dāng)所接雨水容積達(dá)到預(yù)定值0. 4 mm(假定測(cè)量精度為0. 4 mm)時(shí),由于重力作用使自己翻倒,處于等待狀態(tài),另一個(gè)斗室處于接水工作狀態(tài)。當(dāng)其接水量達(dá)到預(yù)定值時(shí),又自己翻倒,處于等待狀態(tài)。在翻斗測(cè)壁上裝有磁鋼,它隨翻斗翻動(dòng)時(shí)從十式舌簧管旁?huà)呙瑁故缴嗷晒芡〝唷<捶访糠挂淮危缴嗷晒鼙憬油ㄒ淮嗡统鲆粋€(gè)開(kāi)關(guān)信號(hào)(脈沖信號(hào))。
翻斗式雨量傳感器直接通過(guò)數(shù)據(jù)采集主機(jī)的計(jì)數(shù)脈沖輸入接口傳送脈沖數(shù)據(jù)。
雨量信息采集可以不使用雨量傳感器,直接采用雨量監(jiān)測(cè)站通過(guò)無(wú)線(xiàn)UPRS網(wǎng)絡(luò)向數(shù)據(jù)處理中心傳送氣象數(shù)據(jù)。
(3)位移傳感器
高精度北斗衛(wèi)星接收機(jī)木身可以進(jìn)行水平和垂直位移測(cè)量,考慮成木及安裝方便等因素,時(shí)常將高精度北斗衛(wèi)星接收機(jī)與電子位移傳感器結(jié)合使用。位移傳感器包含水平位移和垂直位移傳感器,主要有電感式、電容式、光電式、霍爾式、渦流式位移傳感器,激光位移傳感器使用比較方便,不用其他外部設(shè)備,可以輸出數(shù)字和模擬信號(hào),可以與數(shù)據(jù)采集主機(jī)的485接口或4-20 mA輸入接口相連接。
1.2數(shù)據(jù)處理與分析中心
數(shù)據(jù)處理中心負(fù)責(zé)接收處理基準(zhǔn)站和監(jiān)測(cè)點(diǎn)北斗數(shù)據(jù),數(shù)據(jù)處理中心將星歷、原始觀(guān)測(cè)數(shù)據(jù)如衛(wèi)星號(hào)、偽距、偽距標(biāo)準(zhǔn)差、載波相位、載波相位差、瞬時(shí)載波多普勒頻率、載噪比、連續(xù)跟蹤秒數(shù)等數(shù)據(jù)采用雙差解算模式,在優(yōu)化載波相位差分?jǐn)?shù)據(jù)處理方法的基礎(chǔ)上,同時(shí)處理基準(zhǔn)站和監(jiān)測(cè)站載波相位數(shù)據(jù),得到精確的監(jiān)測(cè)點(diǎn)相對(duì)于基準(zhǔn)點(diǎn)的形變量,從而獲取整個(gè)壩體區(qū)域的形變信息。
數(shù)據(jù)處理中心主要由通信網(wǎng)絡(luò)、數(shù)據(jù)處理軟件、服務(wù)器等組成。
1.3遠(yuǎn)程監(jiān)控中心
遠(yuǎn)程監(jiān)控中心可與數(shù)據(jù)處理中心并置,遠(yuǎn)程監(jiān)控中心是整個(gè)系統(tǒng)的神經(jīng)中樞,負(fù)責(zé)監(jiān)測(cè)信息的處理,融合水文、氣象等信息,組成大壩形變監(jiān)測(cè)信息自動(dòng)處理與應(yīng)急預(yù)警信息平臺(tái)。
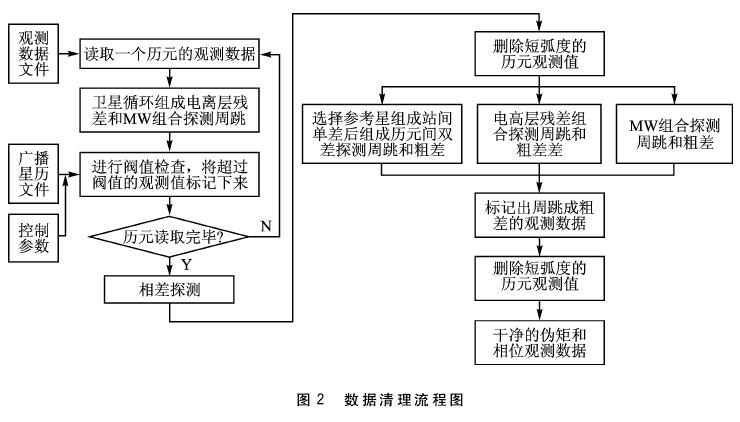
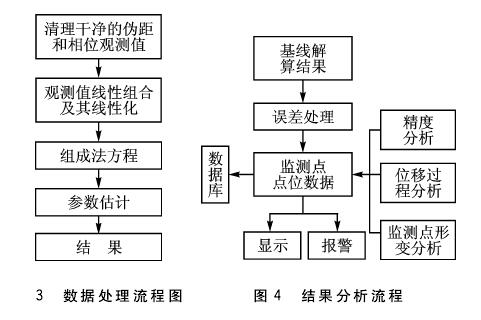
2北斗數(shù)據(jù)處理流程
北斗數(shù)據(jù)處理主要可分為數(shù)據(jù)清理、數(shù)據(jù)處理、結(jié)果分析等幾個(gè)流程,具體如圖z一圖4所不。
3數(shù)據(jù)處理誤差改正模型
在相對(duì)定位中,涉及的關(guān)鍵數(shù)據(jù)處理過(guò)程是基線(xiàn)解算,基線(xiàn)解算可以分為:長(zhǎng)基線(xiàn)、中長(zhǎng)基線(xiàn)和短基線(xiàn)三種類(lèi)型。這里介紹短基線(xiàn)數(shù)據(jù)處理中相關(guān)的誤差影響因素川、誤差消除或削弱的方法。
3.1短基線(xiàn)的衛(wèi)星星歷誤差影響
由衛(wèi)星星歷所給出的衛(wèi)星位置與實(shí)際衛(wèi)星位置的差值稱(chēng)為衛(wèi)星星歷誤差。星歷誤差的大小取決于衛(wèi)星定軌系統(tǒng)的質(zhì)量,如定軌站的數(shù)量及其地理分布、觀(guān)測(cè)值的數(shù)量及其精度、定軌的數(shù)學(xué)力學(xué)模型和定軌軟件的完善程度等。在一般工程應(yīng)用中,特別是北斗短基線(xiàn)的數(shù)據(jù)處理中,由于基線(xiàn)較短,通常采用廣播星歷即可滿(mǎn)足應(yīng)用的要求。
在相對(duì)定位中,衛(wèi)星的星歷誤差對(duì)解算精度影響較小,利用廣播星歷進(jìn)行相對(duì)定位時(shí),即使基線(xiàn)長(zhǎng)度達(dá)到56 km時(shí),其誤差影響仍然保持在1 cm以?xún)?nèi),故對(duì)于短基線(xiàn)(10 km以?xún)?nèi))來(lái)說(shuō),其誤差的影響非常小,可以忽略不計(jì)。
3.2短基線(xiàn)的衛(wèi)星鐘差與接收機(jī)鐘差影響[[3]
衛(wèi)星上計(jì)時(shí)工具是高精度的原子鐘,但衛(wèi)星鐘也不可避免地會(huì)產(chǎn)生誤差,這種誤差既包含系統(tǒng)性的偏差(如鐘差、鐘速、鐘漂等),也包括隨機(jī)性質(zhì)的偏差。系統(tǒng)誤差可以通過(guò)檢驗(yàn)和對(duì)比來(lái)確定,并通過(guò)相應(yīng)的數(shù)學(xué)物理模型加以改正;而隨機(jī)誤差只能通過(guò)鐘的穩(wěn)定度來(lái)描述其統(tǒng)計(jì)特性,無(wú)法確定其具體的大小和方向。
與衛(wèi)星鐘一樣,接收機(jī)鐘也會(huì)產(chǎn)生誤差,接收機(jī)鐘為石英鐘,接收機(jī)鐘差較衛(wèi)星鐘差來(lái)講要顯著一些。該項(xiàng)誤差主要取決于鐘的質(zhì)量,與使用的環(huán)境也有一定的關(guān)系。它對(duì)測(cè)碼偽距觀(guān)測(cè)值和載波相位觀(guān)測(cè)值的影響是相同的。
某一時(shí)刻t,的鐘差一般可以表不為:pt一「」+a, }t一」)+a9 }t一」)+{y(t)dt式中:a〔為t〔時(shí)刻該鐘的鐘差;a、為t,時(shí)刻該鐘的鐘速;a為L(zhǎng)}時(shí)刻該鐘的加速度的一半。
利用載波相位觀(guān)測(cè)值進(jìn)行相對(duì)定位時(shí),根據(jù)衛(wèi)星導(dǎo)航電文所給的衛(wèi)星鐘參數(shù)而求得的衛(wèi)星鐘差不能作為后的精確值,在建立觀(guān)測(cè)方程時(shí)必須將其視為米知參數(shù)。由于進(jìn)行同步觀(guān)測(cè)時(shí),不同的觀(guān)測(cè)值中會(huì)包含有同樣的鐘差影響,故可以通過(guò)觀(guān)測(cè)方程相減來(lái)消除這些鐘差的影響。假設(shè)同步觀(guān)測(cè)n顆衛(wèi)星,在短基線(xiàn)(甚至長(zhǎng)基線(xiàn))數(shù)據(jù)處理中,*先選擇一個(gè)衛(wèi)星作為基準(zhǔn)星,并將其余的(n-1)個(gè)觀(guān)測(cè)方程分別與基準(zhǔn)星觀(guān)測(cè)方程相減,那么在這((n-1)個(gè)求差以后的新觀(guān)測(cè)方程中,某一對(duì)應(yīng)的時(shí)刻t0接收機(jī)的鐘差將被消除。
在兩站之間,進(jìn)行站間單差就可以將衛(wèi)星鐘差消除。把不同時(shí)刻,不同站間的鐘差視為一個(gè)獨(dú)立的米知參數(shù),通過(guò)相應(yīng)的觀(guān)測(cè)方程相減來(lái)消除這些鐘差的影響,后再組成法方程。
3.3短基線(xiàn)的電離層延遲影響
衛(wèi)星電磁波信號(hào)在穿過(guò)電離層時(shí),傳播速度會(huì)產(chǎn)生變化,變化程度主要取決于載波信號(hào)頻率和電離層中的電子密度;傳播路徑也會(huì)發(fā)生略微的彎曲,由此而產(chǎn)生的誤差影響稱(chēng)為電離層延遲誤差。
消除和削弱電離層延遲的方法有很多,比如模型法,包括Bent模型、國(guó)內(nèi)參考電離層模型}Klobuchar模型和雙頻改正模型等。還有用實(shí)測(cè)雙頻觀(guān)測(cè)值來(lái)建立電離層延遲改正模型等,在不同的觀(guān)測(cè)條件下采用相應(yīng)的模型可以較好地削弱電離層延遲影響萬(wàn)’〕。但目前常用的為采用雙頻觀(guān)測(cè)值消除電離層影響,利用雙頻觀(guān)測(cè)值消除一階項(xiàng)電離層影響后,剩余的高階項(xiàng)影響對(duì)于短基線(xiàn)來(lái)說(shuō)一般很小,可忽略不計(jì)。
3.4短基線(xiàn)的對(duì)流層延遲影響
對(duì)流層延遲一般泛指中性大氣層對(duì)電磁波的折射。中性大氣層包括對(duì)流層和平流層,大約是大氣層從地面向上40 km部分。由于折射的80%發(fā)生在對(duì)流層,所以通常也叫做對(duì)流層折射延遲。對(duì)流層對(duì)于15 UHz的射電頻率呈中性,信號(hào)傳播產(chǎn)生非色散延遲,使電磁波傳播路徑比幾何距離長(zhǎng)。電磁波在對(duì)流層的傳播速度只與大氣的折射頻率及電磁波傳播方向有關(guān),與電磁波頻率無(wú)關(guān)。
對(duì)流層折射影響通常表不為天頂方向的對(duì)流層折射量和與高度角相關(guān)的投影函數(shù)M的乘積。并且對(duì)流層延遲的90%是由大氣中十燥氣體引起的,稱(chēng)為十分量;其余10%是由水汽引起的,稱(chēng)為濕分量。因此,對(duì)流層延遲可用天頂方向的十、濕分量延遲及其相應(yīng)的投影函數(shù)表示:
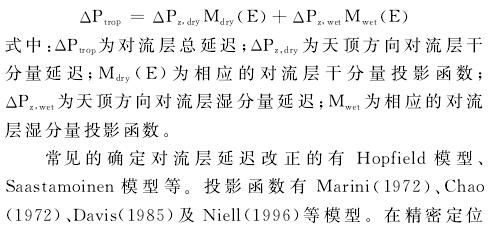
中經(jīng)常采用}1ie11模型,}1ie11模型除了考慮緯度因素外,還考慮了對(duì)流層的季節(jié)性變化和高度不同的影響,其不包含氣象元素,不會(huì)受氣象元素觀(guān)測(cè)誤差的影響,其沒(méi)有考慮實(shí)測(cè)的氣象數(shù)據(jù),也能與無(wú)線(xiàn)電探空數(shù)據(jù)計(jì)算出的投影模型相符合。對(duì)流層影響利用模型改正后,十分量部分的改正精度可以達(dá)到cm級(jí),而濕分量部分的殘余影響還比較大,在精密定位中,必須利用參數(shù)估計(jì)的方法將對(duì)流層殘余影響當(dāng)作一個(gè)參數(shù)進(jìn)行估計(jì)。
大壩形變監(jiān)測(cè)精度要求達(dá)到mm級(jí),需要對(duì)以上幾個(gè)誤差進(jìn)行建模處理,方能滿(mǎn)足要求。
結(jié)語(yǔ)
北斗高精度大壩形變監(jiān)測(cè)主要是利用連續(xù)運(yùn)行衛(wèi)星定位參考站技術(shù)、衛(wèi)星定位數(shù)據(jù)高精度處理技術(shù)、物聯(lián)網(wǎng)技術(shù)、通信技術(shù)及信息處理技術(shù)等,實(shí)現(xiàn)對(duì)大壩形變的全天候、自動(dòng)化、高精度、高可靠監(jiān)測(cè),具有要求通視的常規(guī)測(cè)繪技術(shù)無(wú)法比擬的優(yōu)勢(shì)。
上一條:精確安裝浮球液位控制器需要考慮介質(zhì)密度對(duì)于測(cè)量高度的影響
下一條:電磁流量計(jì)在淡濃堿生產(chǎn)中流量測(cè)量的案例分析
引言
北斗大壩形變監(jiān)測(cè)主要采用北斗差分定位方式,在一個(gè)已知經(jīng)緯度等信息的基準(zhǔn)站設(shè)置高精度北斗接收機(jī),在大壩壩體上設(shè)置的若十高精度北斗接收機(jī)等設(shè)備作為監(jiān)測(cè)點(diǎn),同時(shí)觀(guān)測(cè)相同的北斗衛(wèi)星,獲取相應(yīng)的北斗衛(wèi)星數(shù)據(jù)。采集的北斗衛(wèi)星數(shù)據(jù)通過(guò)通信網(wǎng)絡(luò)送到數(shù)據(jù)處理中心,解算數(shù)據(jù)得到監(jiān)測(cè)點(diǎn)和基準(zhǔn)站的相對(duì)位移,從而達(dá)到監(jiān)測(cè)大壩形變的目的。
1北斗大壩形變監(jiān)測(cè)系統(tǒng)組成
北斗大壩形變監(jiān)測(cè)系統(tǒng)由數(shù)據(jù)采集子系統(tǒng)、通信網(wǎng)絡(luò)、數(shù)據(jù)分析處理中心、遠(yuǎn)程監(jiān)控平臺(tái)等構(gòu)成。
1.1數(shù)據(jù)采集子系統(tǒng)
數(shù)據(jù)采集子系統(tǒng)包括基準(zhǔn)站和監(jiān)測(cè)點(diǎn)兩部分。數(shù)據(jù)采集子系統(tǒng)功能是:采集基準(zhǔn)站及監(jiān)測(cè)站的定位信息,并定時(shí)向數(shù)據(jù)處理中心發(fā)送采集的數(shù)據(jù)。
基準(zhǔn)站是整個(gè)監(jiān)測(cè)系統(tǒng)的基準(zhǔn)參考,需建在穩(wěn)定的基巖上,基準(zhǔn)站安裝高精度北斗接收機(jī)采集衛(wèi)星觀(guān)測(cè)數(shù)據(jù)。監(jiān)測(cè)站分布在整個(gè)形變區(qū)域特征點(diǎn)上,即在壩體預(yù)理多個(gè)高精度北斗接收機(jī)、電子數(shù)據(jù)采集主機(jī)和電子傳感器作為監(jiān)測(cè)站。
1.1.1數(shù)據(jù)采集主機(jī)
數(shù)據(jù)采集主機(jī)特點(diǎn)如下:
①高精度衛(wèi)星接收機(jī)一次輸出的數(shù)據(jù)量較大,要求緩存較大,通信鏈路斷時(shí)需要木地保存大量數(shù)據(jù),要求外接TF存儲(chǔ)器作為北斗數(shù)據(jù)存儲(chǔ)器。MCU選用ST公司的一款(Cortex-M3芯片。
②數(shù)據(jù)采集主機(jī)與高精度北斗衛(wèi)星接收機(jī)同在一個(gè)金屬殼體內(nèi)部,連接高精度北斗接收機(jī)的串口不需防雷處理,采用普通串口即可。RT1 RS232連接北斗接收}JL,采集北斗數(shù)據(jù)。
③隔離485接口主要連接電子式水平傳感器、垂直位移傳感器,485接口水位計(jì)、485接口雨量傳感器、土層濕度傳感器等。
④帶防護(hù)裝置的網(wǎng)口用于連接通信網(wǎng)絡(luò),向數(shù)據(jù)處理中心發(fā)送采集的北斗定位數(shù)據(jù)和外部傳感數(shù)據(jù)。
⑤ 4-20mA模擬信號(hào)輸入口用于連接4-20mA輸出接口的雨量傳感器、水位計(jì)、土層濕度傳感器等。輸入信號(hào)經(jīng)過(guò)電流/電壓變換后送入MCU的A/D轉(zhuǎn)換器進(jìn)行數(shù)字化處理。
⑥許多翻斗式雨量傳感器等輸出的是脈沖信號(hào),可以通過(guò)計(jì)數(shù)脈沖輸入口接入。計(jì)數(shù)脈沖經(jīng)過(guò)普通MCU的I/ O口輸入,結(jié)合內(nèi)部定時(shí)器廣計(jì)數(shù)器統(tǒng)計(jì)雨量。
數(shù)據(jù)采集主機(jī)原理框圖如圖1所示。
圖1數(shù)據(jù)采集主機(jī)原理框圖
1.1.2大壩形變監(jiān)測(cè)常用的電子傳感器
(1)水位計(jì)
水位計(jì)種類(lèi)比較多,有投入式液位計(jì)、浮子式水位計(jì)、超聲波水位計(jì)、壓力式水位計(jì)、等,各有特點(diǎn),使用時(shí)要根據(jù)壩體周?chē)木唧w情況選用。
①浮子式水位計(jì)其原理是由浮子感應(yīng)水位的升降。有用機(jī)械方式直接使浮子傳動(dòng)記錄結(jié)構(gòu)的普通水位計(jì),有把浮子提供的轉(zhuǎn)角量轉(zhuǎn)換成增量電脈沖或二進(jìn)制編碼脈沖作遠(yuǎn)距離傳輸?shù)碾妭鳌?shù)傳水位計(jì),還有由微型浮子和許多十簧管組成的數(shù)字傳感水位計(jì)等。應(yīng)用較廣的是機(jī)械式浮子水位計(jì)。應(yīng)用浮子式水位計(jì)需有測(cè)井設(shè)備,只適合于岸坡穩(wěn)定、河床沖淤很小的低含沙量河段使用。
②超聲波水位計(jì)是反射式水位計(jì)的一種,應(yīng)用聲波遇不同介面反射的原理來(lái)測(cè)定水位。分為氣介式和水介式兩類(lèi)。氣介式以空氣為聲波的傳播介質(zhì),換能器置于水面上方,由水面反射聲波,根據(jù)回波時(shí)間可計(jì)算并顯不出水位。儀器不接觸水體,完全擺脫水中泥沙、流速?zèng)_擊和水草等不利因素的影響。水介式是將換能器安裝在河底,向水面發(fā)射聲波,也不需要建測(cè)井。兩種水位計(jì)均可用電纜傳輸至室內(nèi)顯不或存儲(chǔ)記錄。
③壓力式水位計(jì)的工作原理是測(cè)量水壓力,推算水位。其特點(diǎn)是無(wú)需建靜水測(cè)井,可以將傳感器固定在河底,用引壓管消除大氣壓力,從而直接測(cè)得水位。壓力式水位計(jì)有兩類(lèi):一類(lèi)為氣泡型,在引壓管中不斷輸氣,用自動(dòng)調(diào)節(jié)的壓力天平將水壓力轉(zhuǎn)換成機(jī)械轉(zhuǎn)角量,從而帶動(dòng)記錄機(jī)構(gòu);另一類(lèi)為電測(cè)型,它應(yīng)用固態(tài)壓阻器件作傳感器,可直接將水壓力轉(zhuǎn)變成電壓模量或頻率量輸出,然后用導(dǎo)線(xiàn)傳輸至岸上進(jìn)行處理和記錄。
④跟蹤式水位計(jì)又稱(chēng)接觸式水位計(jì),利用重錘上的電測(cè)針接觸水面發(fā)出電信號(hào),使電機(jī)正轉(zhuǎn)或逆轉(zhuǎn),隨時(shí)跟蹤水面點(diǎn)的位置,從而測(cè)定水位。一般在較陡岸坡上架設(shè)鐵管,懸錘和懸索在管道中升降,驅(qū)動(dòng)記錄或信號(hào)裝置。鐵管進(jìn)水口需有沉沙和凈水設(shè)施。
⑤投入式液位計(jì)是基于所測(cè)液體靜壓與該液體高度成正比的原理,采用擴(kuò)散硅或陶瓷敏感元件的壓阻效應(yīng),將靜壓轉(zhuǎn)成電信號(hào)。經(jīng)過(guò)溫度補(bǔ)償和線(xiàn)性校正,轉(zhuǎn)換成4-20 mA標(biāo)準(zhǔn)電流信號(hào)輸出。投入式液位計(jì)的傳感器部分可直接投入到液體中,變送器部分可用法蘭或支架固定,安裝使用較為方便。
考慮數(shù)據(jù)采集主機(jī)用以連接傳感器的接口只有485接口和4-20 mA輸入接口,因此選用水位時(shí)應(yīng)考慮接口匹配。
(2)雨量傳感器
常用的雨量傳感器是翻斗型雨量傳感器,主要工作原理是承水口收集的雨水,經(jīng)過(guò)上筒(漏斗)注入計(jì)量翻斗,翻斗是用工程塑料注射成型的,由中間隔板分成兩個(gè)等容積的三角斗室。它是一個(gè)機(jī)械雙穩(wěn)態(tài)結(jié)構(gòu),當(dāng)一個(gè)斗室接水時(shí),另一個(gè)斗室處于等待狀態(tài)。當(dāng)所接雨水容積達(dá)到預(yù)定值0. 4 mm(假定測(cè)量精度為0. 4 mm)時(shí),由于重力作用使自己翻倒,處于等待狀態(tài),另一個(gè)斗室處于接水工作狀態(tài)。當(dāng)其接水量達(dá)到預(yù)定值時(shí),又自己翻倒,處于等待狀態(tài)。在翻斗測(cè)壁上裝有磁鋼,它隨翻斗翻動(dòng)時(shí)從十式舌簧管旁?huà)呙瑁故缴嗷晒芡〝唷<捶访糠挂淮危缴嗷晒鼙憬油ㄒ淮嗡统鲆粋€(gè)開(kāi)關(guān)信號(hào)(脈沖信號(hào))。
翻斗式雨量傳感器直接通過(guò)數(shù)據(jù)采集主機(jī)的計(jì)數(shù)脈沖輸入接口傳送脈沖數(shù)據(jù)。
雨量信息采集可以不使用雨量傳感器,直接采用雨量監(jiān)測(cè)站通過(guò)無(wú)線(xiàn)UPRS網(wǎng)絡(luò)向數(shù)據(jù)處理中心傳送氣象數(shù)據(jù)。
(3)位移傳感器
高精度北斗衛(wèi)星接收機(jī)木身可以進(jìn)行水平和垂直位移測(cè)量,考慮成木及安裝方便等因素,時(shí)常將高精度北斗衛(wèi)星接收機(jī)與電子位移傳感器結(jié)合使用。位移傳感器包含水平位移和垂直位移傳感器,主要有電感式、電容式、光電式、霍爾式、渦流式位移傳感器,激光位移傳感器使用比較方便,不用其他外部設(shè)備,可以輸出數(shù)字和模擬信號(hào),可以與數(shù)據(jù)采集主機(jī)的485接口或4-20 mA輸入接口相連接。
1.2數(shù)據(jù)處理與分析中心
數(shù)據(jù)處理中心負(fù)責(zé)接收處理基準(zhǔn)站和監(jiān)測(cè)點(diǎn)北斗數(shù)據(jù),數(shù)據(jù)處理中心將星歷、原始觀(guān)測(cè)數(shù)據(jù)如衛(wèi)星號(hào)、偽距、偽距標(biāo)準(zhǔn)差、載波相位、載波相位差、瞬時(shí)載波多普勒頻率、載噪比、連續(xù)跟蹤秒數(shù)等數(shù)據(jù)采用雙差解算模式,在優(yōu)化載波相位差分?jǐn)?shù)據(jù)處理方法的基礎(chǔ)上,同時(shí)處理基準(zhǔn)站和監(jiān)測(cè)站載波相位數(shù)據(jù),得到精確的監(jiān)測(cè)點(diǎn)相對(duì)于基準(zhǔn)點(diǎn)的形變量,從而獲取整個(gè)壩體區(qū)域的形變信息。
數(shù)據(jù)處理中心主要由通信網(wǎng)絡(luò)、數(shù)據(jù)處理軟件、服務(wù)器等組成。
1.3遠(yuǎn)程監(jiān)控中心
遠(yuǎn)程監(jiān)控中心可與數(shù)據(jù)處理中心并置,遠(yuǎn)程監(jiān)控中心是整個(gè)系統(tǒng)的神經(jīng)中樞,負(fù)責(zé)監(jiān)測(cè)信息的處理,融合水文、氣象等信息,組成大壩形變監(jiān)測(cè)信息自動(dòng)處理與應(yīng)急預(yù)警信息平臺(tái)。
2北斗數(shù)據(jù)處理流程
北斗數(shù)據(jù)處理主要可分為數(shù)據(jù)清理、數(shù)據(jù)處理、結(jié)果分析等幾個(gè)流程,具體如圖z一圖4所不。
3數(shù)據(jù)處理誤差改正模型
在相對(duì)定位中,涉及的關(guān)鍵數(shù)據(jù)處理過(guò)程是基線(xiàn)解算,基線(xiàn)解算可以分為:長(zhǎng)基線(xiàn)、中長(zhǎng)基線(xiàn)和短基線(xiàn)三種類(lèi)型。這里介紹短基線(xiàn)數(shù)據(jù)處理中相關(guān)的誤差影響因素川、誤差消除或削弱的方法。
3.1短基線(xiàn)的衛(wèi)星星歷誤差影響
由衛(wèi)星星歷所給出的衛(wèi)星位置與實(shí)際衛(wèi)星位置的差值稱(chēng)為衛(wèi)星星歷誤差。星歷誤差的大小取決于衛(wèi)星定軌系統(tǒng)的質(zhì)量,如定軌站的數(shù)量及其地理分布、觀(guān)測(cè)值的數(shù)量及其精度、定軌的數(shù)學(xué)力學(xué)模型和定軌軟件的完善程度等。在一般工程應(yīng)用中,特別是北斗短基線(xiàn)的數(shù)據(jù)處理中,由于基線(xiàn)較短,通常采用廣播星歷即可滿(mǎn)足應(yīng)用的要求。
在相對(duì)定位中,衛(wèi)星的星歷誤差對(duì)解算精度影響較小,利用廣播星歷進(jìn)行相對(duì)定位時(shí),即使基線(xiàn)長(zhǎng)度達(dá)到56 km時(shí),其誤差影響仍然保持在1 cm以?xún)?nèi),故對(duì)于短基線(xiàn)(10 km以?xún)?nèi))來(lái)說(shuō),其誤差的影響非常小,可以忽略不計(jì)。
3.2短基線(xiàn)的衛(wèi)星鐘差與接收機(jī)鐘差影響[[3]
衛(wèi)星上計(jì)時(shí)工具是高精度的原子鐘,但衛(wèi)星鐘也不可避免地會(huì)產(chǎn)生誤差,這種誤差既包含系統(tǒng)性的偏差(如鐘差、鐘速、鐘漂等),也包括隨機(jī)性質(zhì)的偏差。系統(tǒng)誤差可以通過(guò)檢驗(yàn)和對(duì)比來(lái)確定,并通過(guò)相應(yīng)的數(shù)學(xué)物理模型加以改正;而隨機(jī)誤差只能通過(guò)鐘的穩(wěn)定度來(lái)描述其統(tǒng)計(jì)特性,無(wú)法確定其具體的大小和方向。
與衛(wèi)星鐘一樣,接收機(jī)鐘也會(huì)產(chǎn)生誤差,接收機(jī)鐘為石英鐘,接收機(jī)鐘差較衛(wèi)星鐘差來(lái)講要顯著一些。該項(xiàng)誤差主要取決于鐘的質(zhì)量,與使用的環(huán)境也有一定的關(guān)系。它對(duì)測(cè)碼偽距觀(guān)測(cè)值和載波相位觀(guān)測(cè)值的影響是相同的。
某一時(shí)刻t,的鐘差一般可以表不為:pt一「」+a, }t一」)+a9 }t一」)+{y(t)dt式中:a〔為t〔時(shí)刻該鐘的鐘差;a、為t,時(shí)刻該鐘的鐘速;a為L(zhǎng)}時(shí)刻該鐘的加速度的一半。
利用載波相位觀(guān)測(cè)值進(jìn)行相對(duì)定位時(shí),根據(jù)衛(wèi)星導(dǎo)航電文所給的衛(wèi)星鐘參數(shù)而求得的衛(wèi)星鐘差不能作為后的精確值,在建立觀(guān)測(cè)方程時(shí)必須將其視為米知參數(shù)。由于進(jìn)行同步觀(guān)測(cè)時(shí),不同的觀(guān)測(cè)值中會(huì)包含有同樣的鐘差影響,故可以通過(guò)觀(guān)測(cè)方程相減來(lái)消除這些鐘差的影響。假設(shè)同步觀(guān)測(cè)n顆衛(wèi)星,在短基線(xiàn)(甚至長(zhǎng)基線(xiàn))數(shù)據(jù)處理中,*先選擇一個(gè)衛(wèi)星作為基準(zhǔn)星,并將其余的(n-1)個(gè)觀(guān)測(cè)方程分別與基準(zhǔn)星觀(guān)測(cè)方程相減,那么在這((n-1)個(gè)求差以后的新觀(guān)測(cè)方程中,某一對(duì)應(yīng)的時(shí)刻t0接收機(jī)的鐘差將被消除。
在兩站之間,進(jìn)行站間單差就可以將衛(wèi)星鐘差消除。把不同時(shí)刻,不同站間的鐘差視為一個(gè)獨(dú)立的米知參數(shù),通過(guò)相應(yīng)的觀(guān)測(cè)方程相減來(lái)消除這些鐘差的影響,后再組成法方程。
3.3短基線(xiàn)的電離層延遲影響
衛(wèi)星電磁波信號(hào)在穿過(guò)電離層時(shí),傳播速度會(huì)產(chǎn)生變化,變化程度主要取決于載波信號(hào)頻率和電離層中的電子密度;傳播路徑也會(huì)發(fā)生略微的彎曲,由此而產(chǎn)生的誤差影響稱(chēng)為電離層延遲誤差。
消除和削弱電離層延遲的方法有很多,比如模型法,包括Bent模型、國(guó)內(nèi)參考電離層模型}Klobuchar模型和雙頻改正模型等。還有用實(shí)測(cè)雙頻觀(guān)測(cè)值來(lái)建立電離層延遲改正模型等,在不同的觀(guān)測(cè)條件下采用相應(yīng)的模型可以較好地削弱電離層延遲影響萬(wàn)’〕。但目前常用的為采用雙頻觀(guān)測(cè)值消除電離層影響,利用雙頻觀(guān)測(cè)值消除一階項(xiàng)電離層影響后,剩余的高階項(xiàng)影響對(duì)于短基線(xiàn)來(lái)說(shuō)一般很小,可忽略不計(jì)。
3.4短基線(xiàn)的對(duì)流層延遲影響
對(duì)流層延遲一般泛指中性大氣層對(duì)電磁波的折射。中性大氣層包括對(duì)流層和平流層,大約是大氣層從地面向上40 km部分。由于折射的80%發(fā)生在對(duì)流層,所以通常也叫做對(duì)流層折射延遲。對(duì)流層對(duì)于15 UHz的射電頻率呈中性,信號(hào)傳播產(chǎn)生非色散延遲,使電磁波傳播路徑比幾何距離長(zhǎng)。電磁波在對(duì)流層的傳播速度只與大氣的折射頻率及電磁波傳播方向有關(guān),與電磁波頻率無(wú)關(guān)。
對(duì)流層折射影響通常表不為天頂方向的對(duì)流層折射量和與高度角相關(guān)的投影函數(shù)M的乘積。并且對(duì)流層延遲的90%是由大氣中十燥氣體引起的,稱(chēng)為十分量;其余10%是由水汽引起的,稱(chēng)為濕分量。因此,對(duì)流層延遲可用天頂方向的十、濕分量延遲及其相應(yīng)的投影函數(shù)表示:
中經(jīng)常采用}1ie11模型,}1ie11模型除了考慮緯度因素外,還考慮了對(duì)流層的季節(jié)性變化和高度不同的影響,其不包含氣象元素,不會(huì)受氣象元素觀(guān)測(cè)誤差的影響,其沒(méi)有考慮實(shí)測(cè)的氣象數(shù)據(jù),也能與無(wú)線(xiàn)電探空數(shù)據(jù)計(jì)算出的投影模型相符合。對(duì)流層影響利用模型改正后,十分量部分的改正精度可以達(dá)到cm級(jí),而濕分量部分的殘余影響還比較大,在精密定位中,必須利用參數(shù)估計(jì)的方法將對(duì)流層殘余影響當(dāng)作一個(gè)參數(shù)進(jìn)行估計(jì)。
大壩形變監(jiān)測(cè)精度要求達(dá)到mm級(jí),需要對(duì)以上幾個(gè)誤差進(jìn)行建模處理,方能滿(mǎn)足要求。
結(jié)語(yǔ)
北斗高精度大壩形變監(jiān)測(cè)主要是利用連續(xù)運(yùn)行衛(wèi)星定位參考站技術(shù)、衛(wèi)星定位數(shù)據(jù)高精度處理技術(shù)、物聯(lián)網(wǎng)技術(shù)、通信技術(shù)及信息處理技術(shù)等,實(shí)現(xiàn)對(duì)大壩形變的全天候、自動(dòng)化、高精度、高可靠監(jiān)測(cè),具有要求通視的常規(guī)測(cè)繪技術(shù)無(wú)法比擬的優(yōu)勢(shì)。
上一條:精確安裝浮球液位控制器需要考慮介質(zhì)密度對(duì)于測(cè)量高度的影響
下一條:電磁流量計(jì)在淡濃堿生產(chǎn)中流量測(cè)量的案例分析
相關(guān)產(chǎn)品



- 相關(guān)文章
-
- 80G 高頻雷達(dá)物位計(jì)液位計(jì)適用于泡沫和攪拌工況的原因分析 【2025-08-06】
- 80G高頻雷達(dá)液位計(jì)防腐防爆耐高溫的功能是如何實(shí)現(xiàn)的? 【2025-07-23】
- 高頻雷達(dá)液位計(jì)在石油行業(yè)液位測(cè)量應(yīng)用中的優(yōu)勢(shì)有哪些 【2025-07-17】
- 雷達(dá)液位計(jì)測(cè)量時(shí)如何有效規(guī)避攪拌葉片和泡沫的干擾? 【2025-07-07】
- 如何準(zhǔn)確快速地對(duì)化工設(shè)備過(guò)程控制儀表的故障進(jìn)行分析和處理 【2015-06-10】
- 詳解關(guān)于磁翻板液位計(jì)配件都有哪些 【2016-02-22】
- 孔板流量計(jì)測(cè)量硫氣流量過(guò)程中堵塞原因分析及解決方法 【2016-05-23】
- 淺析影響渦街流量計(jì)測(cè)量氣體介質(zhì)時(shí)的精度的原因 【2017-03-31】
- 天然氣旋進(jìn)旋渦流量計(jì)合理的取壓方式對(duì)于測(cè)量效果的影響 【2016-06-05】
- 淺析橢圓齒輪流量計(jì)工作時(shí)出現(xiàn)故障類(lèi)型及解決措施 【2015-06-09】